< индекс---содержание № 3---след. статья в № 3---след. в рубрике >
УДК 517.977.5:629.78
АДАПТИВНЫЕ ДЕКОМПОЗИРУЮЩИЕ АЛГОРИТМЫ УПРАВЛЕНИЯ ПОЛУАКТИВНОЙ СВЯЗКОЙ МЕХАНИЧЕСКИХ СИСТЕМ[1]
В.М. Суханов, Е.М. Фирсова
Институт проблем управления им. В.А. Трапезникова, г. Москва
Рассмотрена задача формирования адаптивных алгоритмов управления, обеспечивающих декомпозицию модели космического роботизированного модуля (КРМ), являющегося многосвязной нестационарной механической системой. Предложена методика синтеза алгоритма перестройки параметров регулятора на основе принципов беспоисковой адаптации с эталонной моделью, обеспечивающего желаемую динамику функционирования подсистем модуля. Исследована возможность демпфирования упругих колебаний транспортируемого модулем груза путем нестандартного применения штатных приводов манипулятора КРМ.
Рассматриваемый в работе
космический робототехнический модуль (КРМ)
является свободнолетающим маневрирующим
транспортным средством, способным
одновременно решать задачи поиска, захвата,
транспортировки и установки полезного (не
обязательно жесткого) груза в окрестности
пилотируемой орбитальной станции. Как
видно из рис. 1, механическая система КРМ
представляет собой связку нескольких
подсистем, состоящую из жесткого несущего
тела (корпуса) и шарнирно присоединенной к
нему подсистемы носимых тел, включающей в
себя один или несколько трехзвенных
манипуляторов с концевым схватом,
удерживающим нежесткий полезный груз (Г),
который рассматривается как третий
компонент связки. Идеализированная модель
манипулятора может быть определена в виде
системы шарнирно связанных между собой
жестких звеньев длиной ![]() и
и ![]() .
Образованную указанным способом
механическую структуру для краткости
обозначим КРМ-Г. Кроме того, на рис. 1
обозначено:
CXY
– базовая система координат,
.
Образованную указанным способом
механическую структуру для краткости
обозначим КРМ-Г. Кроме того, на рис. 1
обозначено:
CXY
– базовая система координат, ![]() –
система координат, связанная с корпусом КРМ; оX'Y'
– базовая система координат, смещенная в
центр масс (“о”) несущего тела КРМ.
Остальные обозначения на рисунке
определены в тексте статьи ниже.
–
система координат, связанная с корпусом КРМ; оX'Y'
– базовая система координат, смещенная в
центр масс (“о”) несущего тела КРМ.
Остальные обозначения на рисунке
определены в тексте статьи ниже.
Полученная в работе [1] математическая модель свободнолетающего космического робототехнического модуля в режиме транспортировки нежесткого груза имеет вид

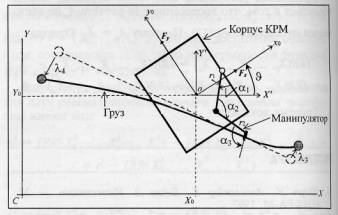
Рис. 1. Конфигурация связки «КРМ — нежесткий груз»
где q = (q1 = X0, q2 = Y0, q3 = J, q4 = a1 , q5 =a2 , q6 = a3 , q7 =l 3 , q8 =l4 ) – вектор обобщенных координат КРМ-Г; первые три компоненты вектора q, т. е. совокупность, q0 = (X, Y, J), будем рассматривать как независимые обобщенные координаты, определяющие положение несущего тела (корпуса робота) в инерциальной системе координат CXY. Остальные пять компонент q4, ..., q8 , которые обозначим qM-Г = (a1,a2,a3 , l3 , l4), определяют положение носимых тел относительно осей, связанных с несущим телом модуля; A(q) - квадратная симметричная матрица коэффициентов инерции, являющихся функциями обобщенных координат; H, B - постоянные (n x n) матрицы, элементы которых определяются известным образом на основе диссипативной и потенциальной функций, зависящих чаще всего от физических свойств транспортируемого нежесткого груза; Fu (t) - вектор управляющих сил; второе слагаемое в правой части уравнения (1) - матрица обобщенных кориолисовых и центробежных сил, порождаемых относительными (вращательными и поступательными) движениями несущего и носимых тел КРМ-Г; ek - n-мерный единичный вектор с k-й ненулевой строкой.
Нелинейные дифференциальные уравнения (1) в рамках исследования плоского движения КРМ-Г являются наиболее общими и пригодны для описания большинства фаз (режимов) функционирования КРМ. В частности, модель (1) описывает траекторное и угловое движения связки КРМ-Г под действием реактивных сил Fx,Fy и моментов MJ , Maj (создаваемых исполнительными органами системы ориентации и приводами звеньев манипулятора, соответственно) в плоскости системы координат CXY, связанной с орбитальной станцией и формируемой в пространстве ее радиотехническими средствами. Математическая модель (1) связки КРМ-Г представляет собой систему нелинейных уравнений с переменными коэффициентами и характеризуется наличием межсистемных связей, что существенно осложняет качественное решение задач управления на множестве режимов работы КРМ.
В связи с высокими требованиями к точности и безопасности функционирования КРМ вблизи поверхности орбитальной станции в условиях нестационарности и неопределенности изменения параметров КРМ в данной работе решается задача декомпозиции полной модели связки КРМ-Г на автономные подсистемы и обеспечения желаемой динамики изменения координат связки КРМ-Г на основе методов адаптивного управления.
Теория декомпозиции управляемых систем на отдельные подсистемы с последующим синтезом управлений для локальных подсистем является предметом исследований в течение ряда десятилетий [2]. В обширном списке публикаций по теории декомпозиции можно выделить два направления. В основу первого направления [3, 4], впервые сформулированного И.Н. Вознесенским, положена идея декомпозиции многосвязной системы путем формирования специальных компенсирующих обратных связей. В большинстве работ, относящихся к этому направлению, алгоритмы синтеза декомпозирующих обратных связей строятся на основе численных процедур, применение которых сопряжено с необходимостью иметь точную информацию о структуре и параметрах математических моделей управляемых систем, что делает такие процедуры малоэффективными.
Принципиально иной подход к решению задачи декомпозиции, осуществляемый не с помощью компенсирующих обратных связей, а за счет управляющих сигналов, формируемых с помощью нетрадиционных алгоритмов, учитывающих физические особенности объектов управления, развит в работе [5]. Такого типа алгоритмы придают системам свойства слабой чувствительности к изменениям параметров объекта управления, что делает их привлекательными для решения конкретных задач.
Особо актуальным как в теоретическом, так и в прикладном аспекте для осуществления декомпозиции нестационарных нелинейных систем управления, к которым относится и рассматриваемая в данной работе система управления свободнолетающим космическим роботизированным модулем, является развитие методов беспоисковой адаптации с эталонной моделью. В соответствии с этим в работе рассматривается задача формирования адаптивной системы управления КРМ-Г, которая позволяет реализовать декомпозицию системы на автономные подсистемы с желаемыми динамическими характеристиками движения.
Полученные результаты показывают, что применение принципа беспоисковой адаптации теоретически позволяет решить задачу высокоточного и безопасного управления нестационарной нелинейной механической системой типа “управляемая платформа – манипулятор – упругий груз”, минуя процедуру определения нестационарных параметров математической модели объекта управления.
Последующие исследования должны быть направлены на выявление условий практической реализуемости предложенных алгоритмов адаптации, позволяющих декомпозировать математическую модель рассмотренного в работе роботизированного космического модуля на ряд независимых подсистем управления с желаемой динамикой.
1. Рутковский В.Ю., Суханов В.М. Динамическая модель свободнолетающего космического робототехнического модуля // Автоматика и телемеханика. – 2000. – № 5.
2. Шильяк Д. Децентрализованное управление сложными системами. – М.: Мир, 1994.
3. Вознесенский И.Н. О регулировании машин с большим числом регулируемых параметров // Автоматика и телемеханика. – 1938. № 4.
4. Крутько П.Д. Аналитическое решение задачи Вознесенского для стационарных и нестационарных линейных систем // Изв. РАН. Теория и системы управления. – 1995. – № 4.
5. Крутько П.Д., Черноусько Ф.Л. Декомпозирующие алгоритмы управления движением нелинейных динамических систем // Изв. РАН. Теория и системы управления. – 2001. – № 4.
6. Петров Б.Н., Рутковский В.Ю., Крутова И.Н., Земляков С.Д. Принципы построения и проектирования самонастраивающихся систем управления. – М.: Машиностроение, 1972.
( (095) 334-87-79
E-mail: suhv@ipu.ru
[1] Работа выполнена при финансовой поддержке РФФИ (проект 03-01-00062) и Программы фундаментальных исследований №16 Отделения ЭММПУ РАН.